Accurate and efficient modeling of suture thread is crucial for autonomous surgeries and surgical training simulators. Current models require fine-tuning and become computationally costly with added complexities. To overcome these issues, we have introduced a novel approach using Control Barrier Functions (CBF) to simplify suture thread motion modeling, eliminating the need for complex dynamic and force calculations. The model represents the thread as a chain of single integrators with constraints on connectivity and obstacle (tissue) interactions. We investigate the construction of barrier functions and demonstrate the model’s real-time performance.
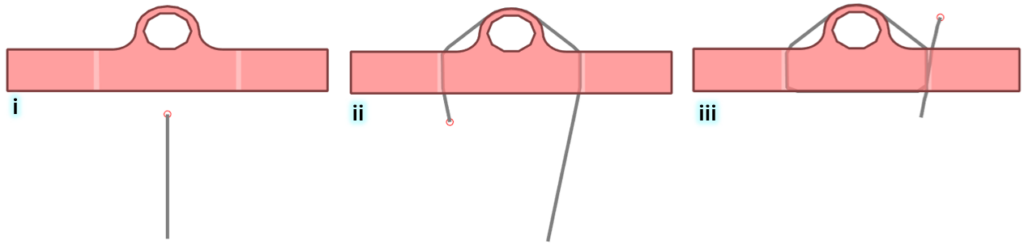
Three instances of a hernia repair simulation in real-time. The pink geometry is the hernia tissue, and the gray line corresponds to the suture thread.
In this project, we combine the objectives of locational coverage problems and persistent coverage problems to enable a group of agents to cooperatively achieve persistent coverage over a domain.
In particular, a locational optimization criterion provides the multi-robot system (MRS) with coordination of configuration over the entire domain. An awareness maximization criterion leads the MRS to patrol the environment for persistent coverage. We achieve this in a decentralized fashion by allowing each agent to have its own opinion of awareness of the environment, which we encode as a time-varying density function. To leverage the awareness gained by neighboring agents, awareness levels are exchanged with Delaunay graph neighbors, and these are combined with agents’ measurements through a dynamic consensus filter. In this project, local exchanges of awareness levels between neighbors are shown to allow awareness information over the entire domain to propagate across the entire team with performance guarantees. Moreover, a gradient-based control strategy is proposed, and a bound on the size of the MRS in terms of the rate of gain and loss of awareness and the size of the domain for guaranteed loss of awareness is provided.
An interactive multi-robot aerial cinematography framework is proposed in this project to provide high-level position instructions to unmanned aerial vehicles (UAVs) in a distributed fashion by leveraging multi-robot system (MRS) coverage control. The following principles are considered when designing a control strategy:
1) the UAVs should stay some distance from the target;
2) the MRS can dynamically observe the target from different points of view;
3) the pilot should be able to manipulate the UAVs from some high-level specifications, i.e., the system should be user-friendly and easy to express different artistic styles, such that the pilot does not have to learn complex case-by-case commands.
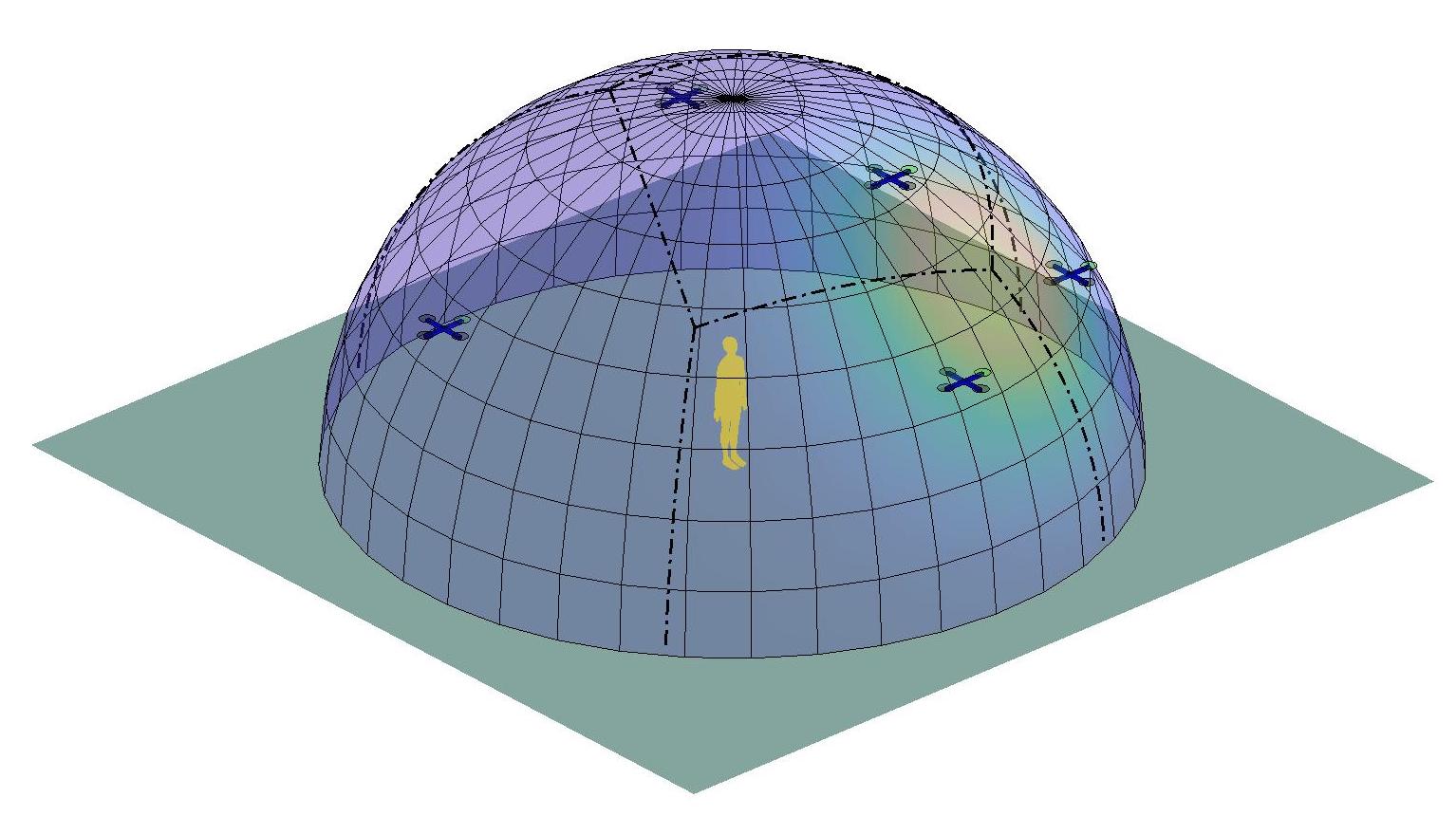
To meet these requirements, we assume a virtual hemisphere with its center located at the real or virtual target, and UAVs maintain a prescribed distance to the hemisphere’s center. The UAVs are deployed by defining their distribution over the hemisphere to provide different points of view. Furthermore, the abstraction of the state of the MRS can be used as two exogenous inputs, i.e., the predicted motion of the hemisphere (target) and the density over the hemispherical surface, to manipulate the MRS’s behavior. These two inputs can be determined either in decentralized or centralized manners, e.g., obtained from decentralized autonomous sensor-based techniques, or provided by a pilot using a human-computer interface such as a joystick or a tablet. The proposed control strategy allows an MRS to distribute over the hemisphere and track the exogenous inputs efficiently.
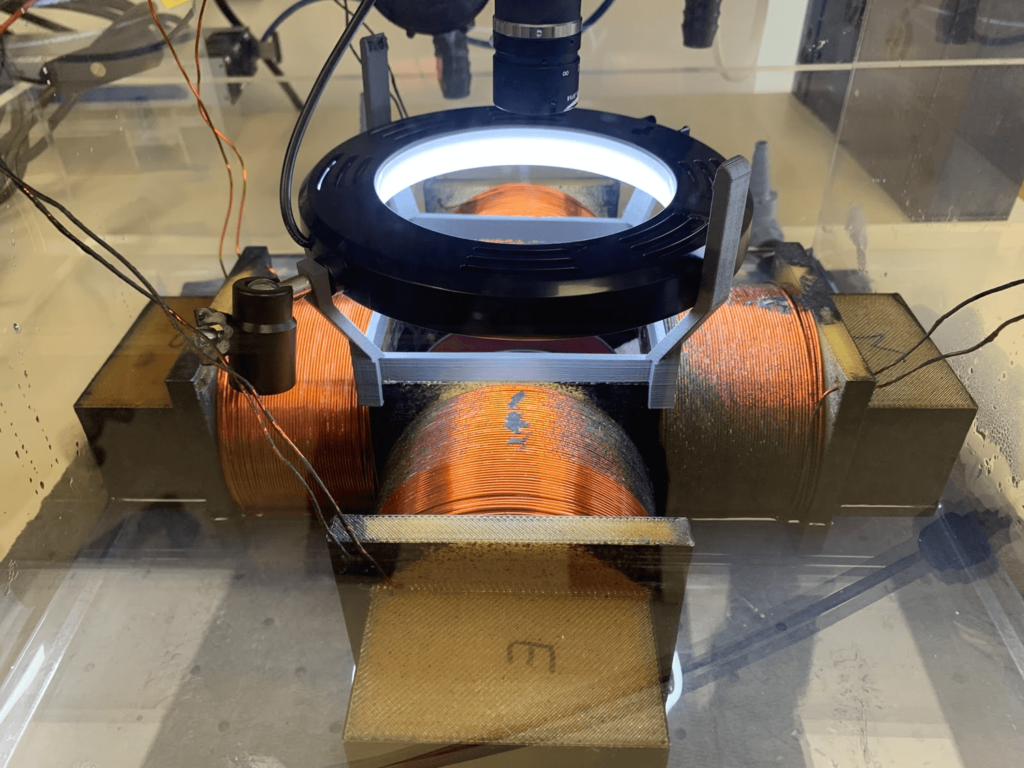
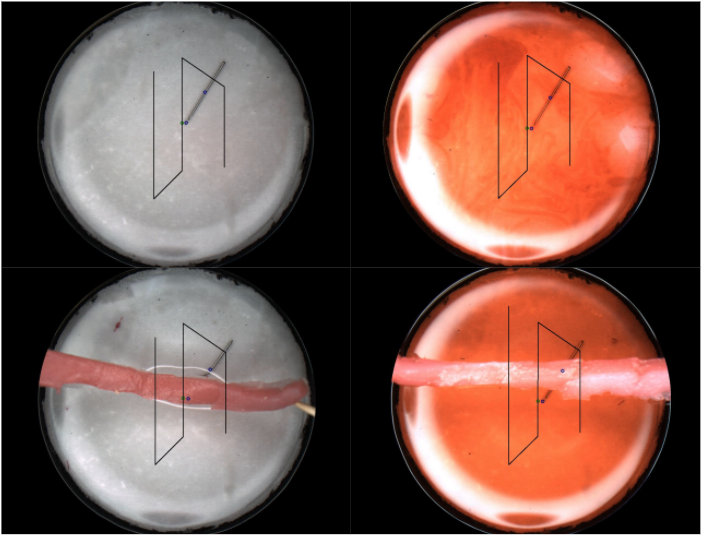
Minimally invasive surgeries would require tiny robots in order to ease the accessibility to various hard to reach regions. One way to accomplish this is to use magnetic needles placed in an external magnetic field generated by an array of electromagnets. Since the needle is driven by the change in external magnetic field, it allows for rapid force and torque transfer onto the needle in order for it to perform various surgical tasks.
For the MagnetoSuture Project, we localize the needle in cluttered simulated surgical environments, for real-time feedback control applications using a combination of Neural Network based Segmentation and traditional Computer Vision methods. We are currently operating the needle in 2D, i.e., the localization method detects current state, which includes the X-Y co-ordinates of the needle center and the its angular orientation.
The control algorithm for needle’s motion is based on the dipole model of interaction between the needle and the external magnetic field. The model is constrained to be non-holonomic, which ensures that force is applied along the length of the needle. Additionally, the algorithm prioritizes controlling the motion of the tip of the needle to follow the desired trajectories, one of which is the Running Suture Pattern which has been shown in the image below.
The project is in collaboration with the IMERSE LAB at the Johns Hopkins University. You can check them out here : https://imerse.lcsr.jhu.edu/
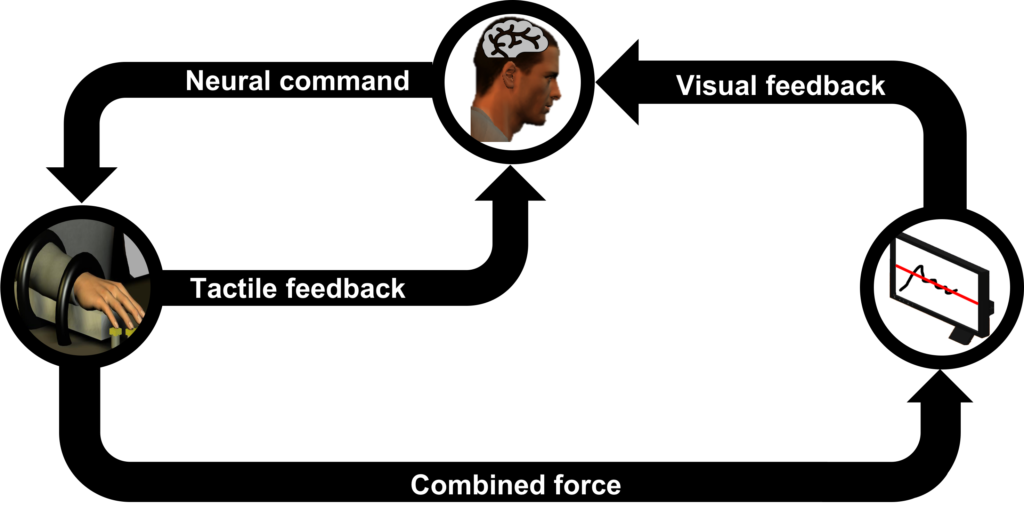
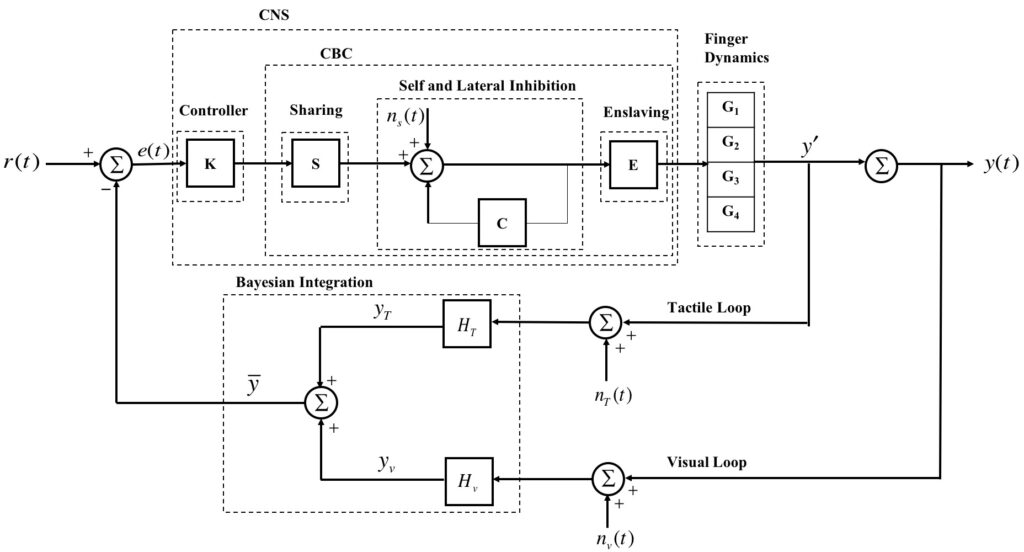
Motor synergies are neural organizations of a set of redundant motor effectors that interact with one another to compensate for each other’s error and ensure the stabilization of a performance variable. Recent studies have demonstrated that the central nervous system synergistically coordinates its numerous motor effectors through Bayesian multi-sensory integration. Deficiency in sensory synergy weakens the synergistic interaction between the motor effectors. Here, we scrutinize the underlying neuro-mechanical mechanism behind this phenomenon through spectral analysis and modeling. We validate our model-generated results using experimental data reported in the literature collected from participants performing a finger force production task with and without tactile feedback (manipulated through injection of anesthesia in fingers). Our spectral analysis demonstrates that the error compensation feature of synergies occurs only at low frequencies. Besides, our model shows that the neurophysiological structures involving short-latency back-coupling loops similar to well-known Renshaw cells explain the deterioration of synergy due to sensory deprivation.
In this project, we sought a mechanism to influence a group of robots (e.g., swarms) based on the coverage control algorithm. Two inputs, time-varying density and time-varying domain, which are agnostic to the size of the system are user-designed to achieve the control of the robotic team.
When the domain is restricted to be convex, the control law we developed can efficiently approach and maintain a centroid Voronoi tessellation (CVT) configuration of the domain even if the density function or the domain is evolving fast.
In some practical applications, the time-varying domain may become non-convex in the course of evolution. To solve this type of problem, a time-varying diffeomorphism transforms the non-convex domain into a convex one such that the control algorithm we proposed before can be applied. The trajectories of each robot in the team in the transformed domain are brought back to the real world via the inverse of the transformation. The resulting control law can capture the variation of the non-convex domain efficiently.
The proposed algorithm was verified in both simulation in MATLAB and real robotic implementation at the Collaborative Controls & Robotics Laboratory (CCRL), UMD.
Multi-Agent Control Using Coverage Over Time-Varying Convex Domains
Multi-Agent Control Using Coverage Over Time-Varying Non-Convex Domains
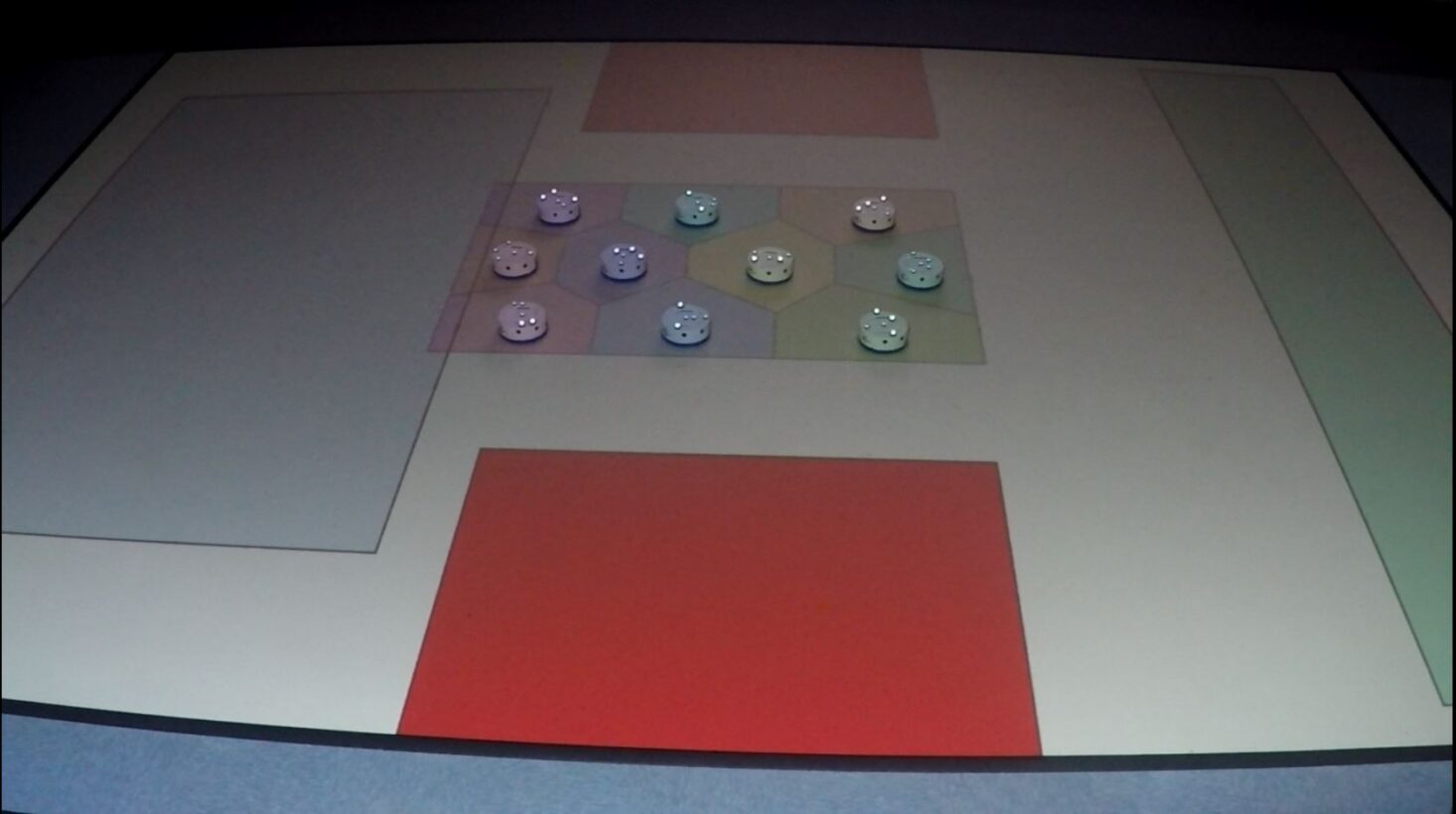
Coverage control is a heavily-studied application of swarm robotics. Typically the domain that the team of agents is trying to survey is prescribed a density function that dictates the importance of a point in the domain. Using the info from the density function, the agents attempt to optimally survey the domain. Coverage control has applications in precision agriculture, search and rescue, reach-avoid games, and human-swarm interaction.
In this project, we focused primarily on the study of one-dimensional coverage and finding new conditions on optimal coverage. In this work, we found a new sufficient condition on the density function, loosening the requirements of the past condition. In particular, we were able to prove that more classes of density functions guarantee optimal coverage on them.
We tested simulations of the sufficient condition in MATLAB and then tested them on robots at the Robotarium at Georgia Tech as may be seen in the video below.