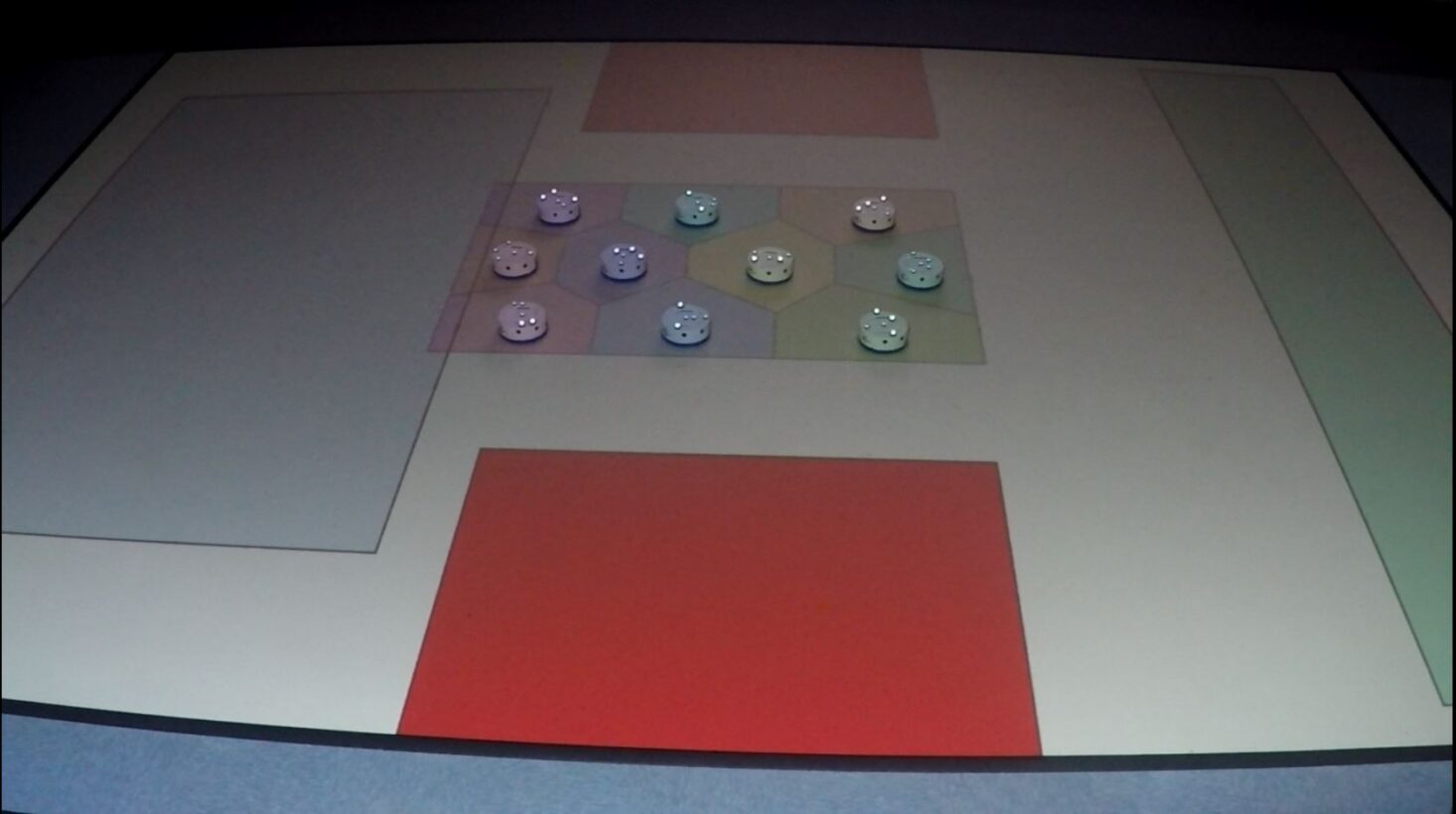
In this project, we sought a mechanism to influence a group of robots (e.g., swarms) based on the coverage control algorithm. Two inputs, time-varying density and time-varying domain, which are agnostic to the size of the system are user-designed to achieve the control of the robotic team.
When the domain is restricted to be convex, the control law we developed can efficiently approach and maintain a centroid Voronoi tessellation (CVT) configuration of the domain even if the density function or the domain is evolving fast.
In some practical applications, the time-varying domain may become non-convex in the course of evolution. To solve this type of problem, a time-varying diffeomorphism transforms the non-convex domain into a convex one such that the control algorithm we proposed before can be applied. The trajectories of each robot in the team in the transformed domain are brought back to the real world via the inverse of the transformation. The resulting control law can capture the variation of the non-convex domain efficiently.
The proposed algorithm was verified in both simulation in MATLAB and real robotic implementation at the Collaborative Controls & Robotics Laboratory (CCRL), UMD.