Coverage control is a heavily-studied application of swarm robotics. Typically the domain that the team of agents is trying to survey is prescribed a density function that dictates the importance of a point in the domain. Using the info from the density function, the agents attempt to optimally survey the domain. Coverage control has applications in precision agriculture, search and rescue, reach-avoid games, and human-swarm interaction.
In this project, we focused primarily on the study of one-dimensional coverage and finding new conditions on optimal coverage. In this work, we found a new sufficient condition on the density function, loosening the requirements of the past condition. In particular, we were able to prove that more classes of density functions guarantee optimal coverage on them.
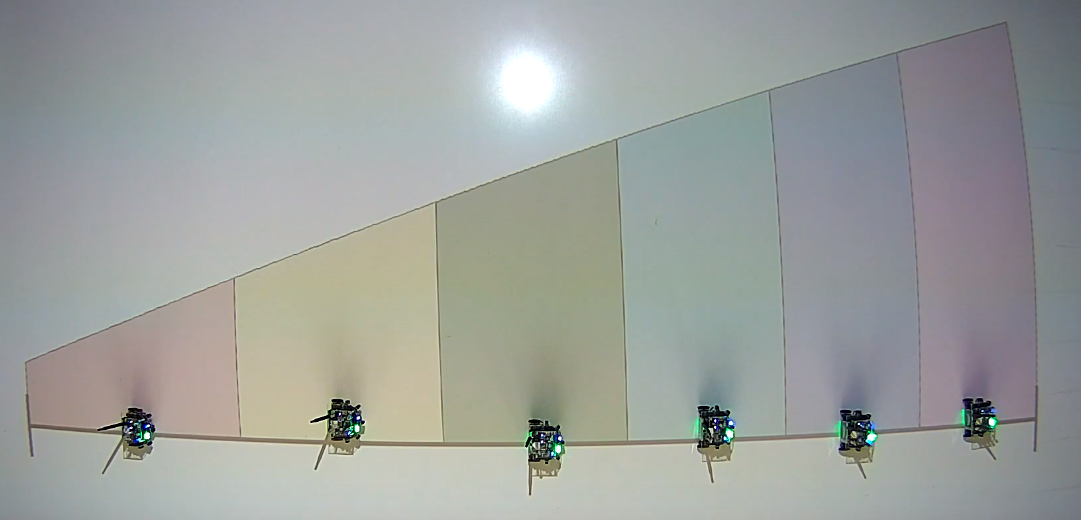
We tested simulations of the sufficient condition in MATLAB and then tested them on robots at the Robotarium at Georgia Tech as may be seen in the video below.