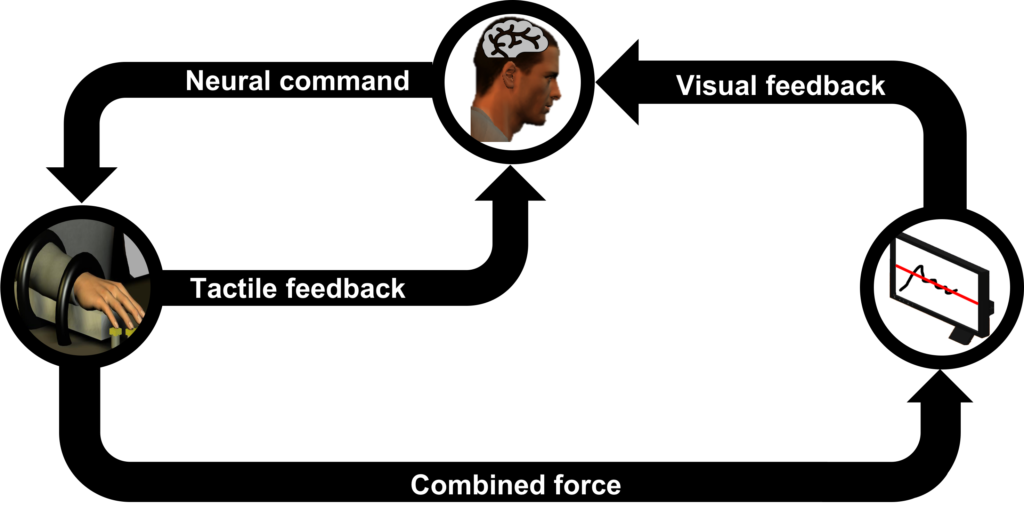
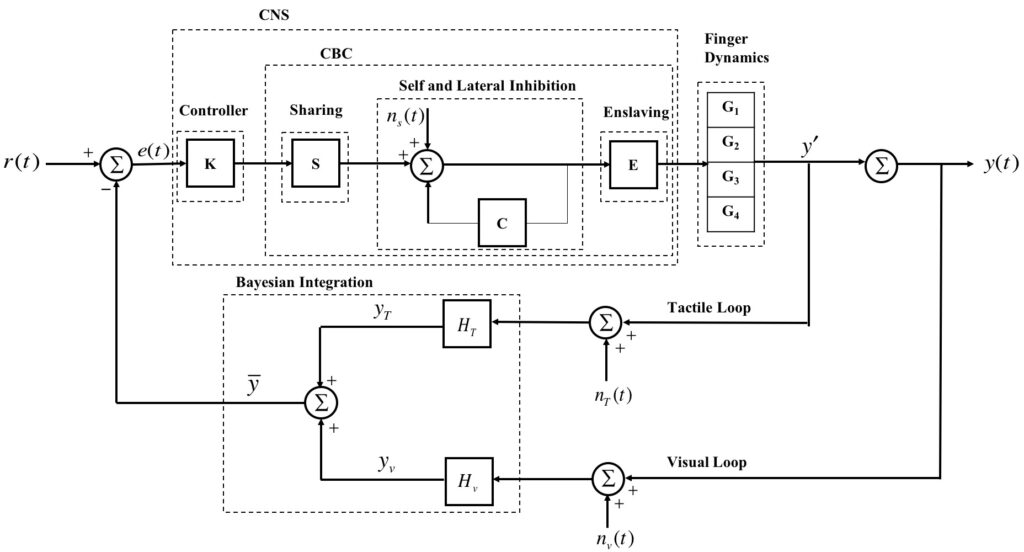
Motor synergies are neural organizations of a set of redundant motor effectors that interact with one another to compensate for each other’s error and ensure the stabilization of a performance variable. Recent studies have demonstrated that the central nervous system synergistically coordinates its numerous motor effectors through Bayesian multi-sensory integration. Deficiency in sensory synergy weakens the synergistic interaction between the motor effectors. Here, we scrutinize the underlying neuro-mechanical mechanism behind this phenomenon through spectral analysis and modeling. We validate our model-generated results using experimental data reported in the literature collected from participants performing a finger force production task with and without tactile feedback (manipulated through injection of anesthesia in fingers). Our spectral analysis demonstrates that the error compensation feature of synergies occurs only at low frequencies. Besides, our model shows that the neurophysiological structures involving short-latency back-coupling loops similar to well-known Renshaw cells explain the deterioration of synergy due to sensory deprivation.
 Collaborative Controls and Robotics Lab
Collaborative Controls and Robotics Lab