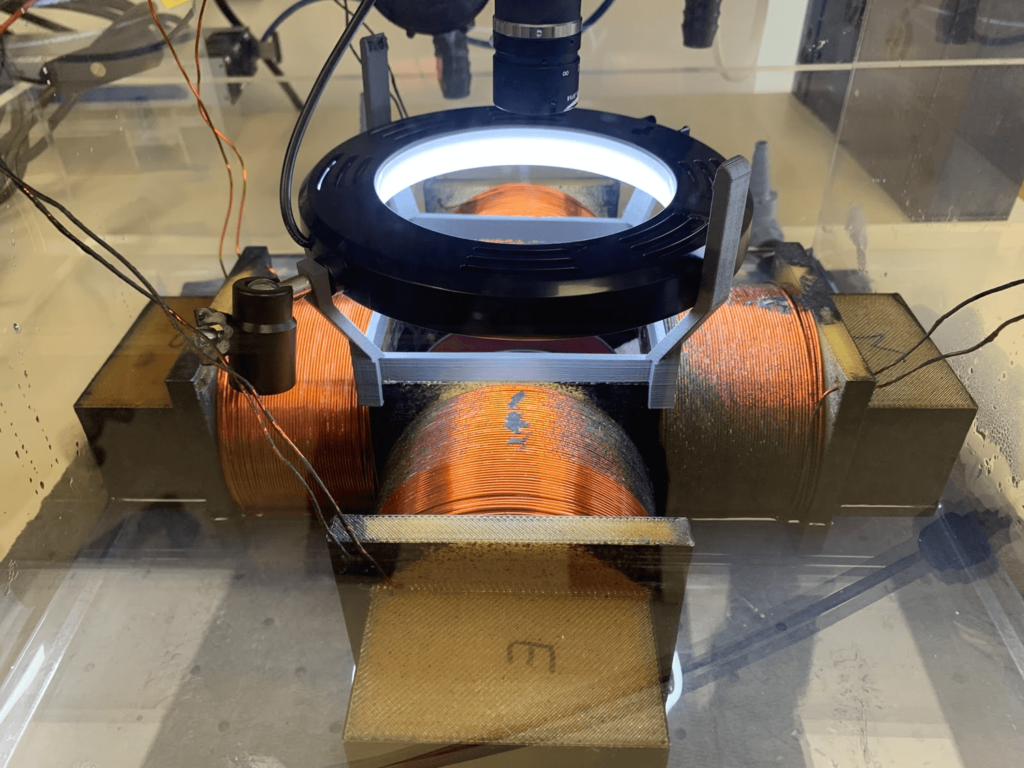
Minimally invasive surgeries would require tiny robots in order to ease the accessibility to various hard to reach regions. One way to accomplish this is to use magnetic needles placed in an external magnetic field generated by an array of electromagnets. Since the needle is driven by the change in external magnetic field, it allows for rapid force and torque transfer onto the needle in order for it to perform various surgical tasks.
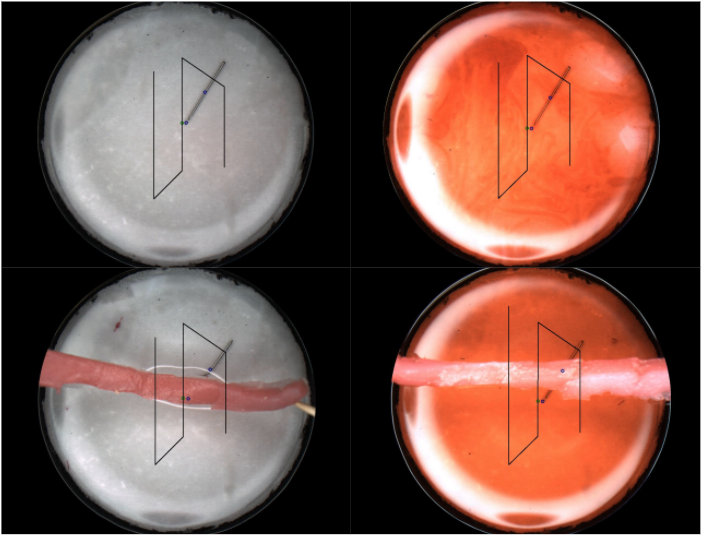
For the MagnetoSuture Project, we localize the needle in cluttered simulated surgical environments, for real-time feedback control applications using a combination of Neural Network based Segmentation and traditional Computer Vision methods. We are currently operating the needle in 2D, i.e., the localization method detects current state, which includes the X-Y co-ordinates of the needle center and the its angular orientation.
The control algorithm for needle’s motion is based on the dipole model of interaction between the needle and the external magnetic field. The model is constrained to be non-holonomic, which ensures that force is applied along the length of the needle. Additionally, the algorithm prioritizes controlling the motion of the tip of the needle to follow the desired trajectories, one of which is the Running Suture Pattern which has been shown in the image below.
The project is in collaboration with the IMERSE LAB at the Johns Hopkins University. You can check them out here : https://imerse.lcsr.jhu.edu/