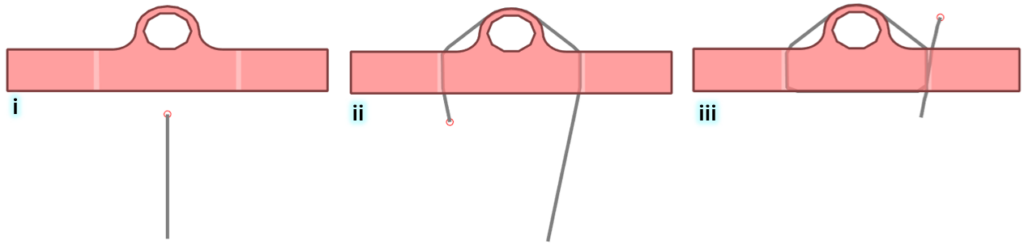
Accurate and efficient modeling of suture thread is crucial for autonomous surgeries and surgical training simulators. Current models require fine-tuning and become computationally costly with added complexities. To overcome these issues, we have introduced a novel
approach using Control Barrier Functions (CBF) to simplify suture thread motion modeling, eliminating the need for complex dynamic and force calculations. The model represents the thread as a chain of single integrators with constraints on connectivity and obstacle (tissue) interactions. We investigate the construction of barrier functions and demonstrate the model’s real-time performance.